Summer of 2015, Hack Pittsburgh was challenged to build and program a fully autonomous "powerwheels" race car to compete at the World Maker Faire in NYC - in only three months! The event organizers needed to find a hackerspace that could compete against the unchallenged Microsoft-backed team.
We accepted the challenge!
The hackerspace had experience building this type of physical car, but needed help building all of the sensing, planning, and control software. This was a task taken on by our three member software team: Arjit, Volker, and myself. (left to right)
We selected ROS as the operating system to handle the communication and run our custom programs. It enabled us to plug in existing packages like Gmapping and AMCL to augment our systems and allow for our accelerated design timeline.
Version 1: We fully instrumented this small RC car and used it to test all of our software while the large Autonomous Powerwheels car was being fabricated.
Once maps were built, we were able to implement a particle-filter localization system using the static map (AMCL). During this time, I was the primary systems tester and integrator.
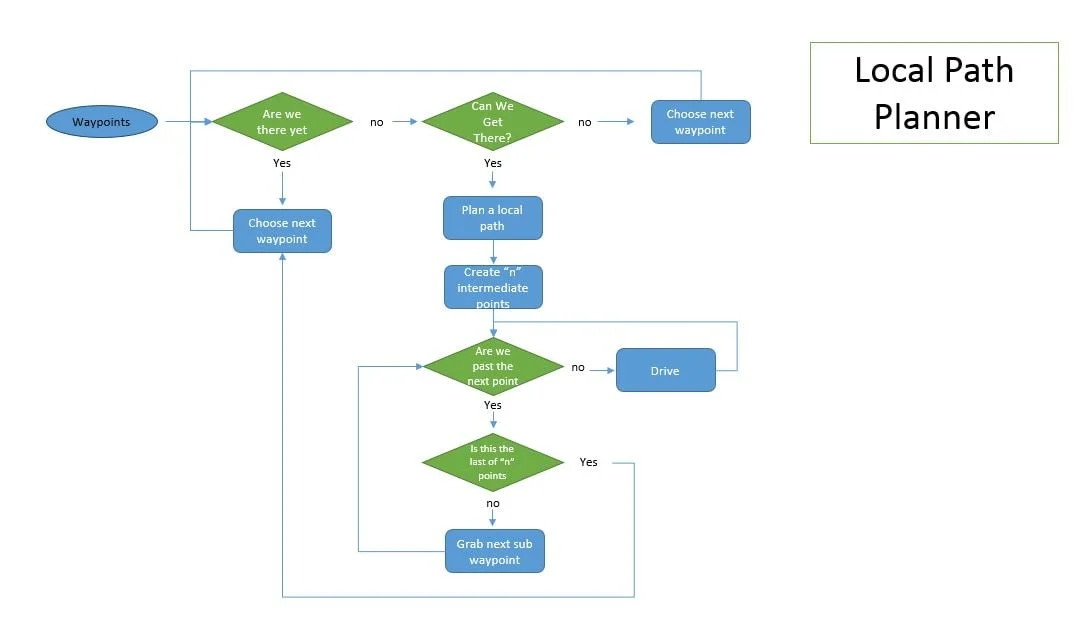
Once we could reliably localize the robot within the map, the next step was to develop a local path planner to spline between global waypoints. I based this off of a set of polynomial splines which could be tuned to match our vehicle’s potential turning radius. I was the lead software engineer for this effort.
Here you can see the particle filter (blue) being guided along the local path output of my planner (red) which travels between global waypoints (green)
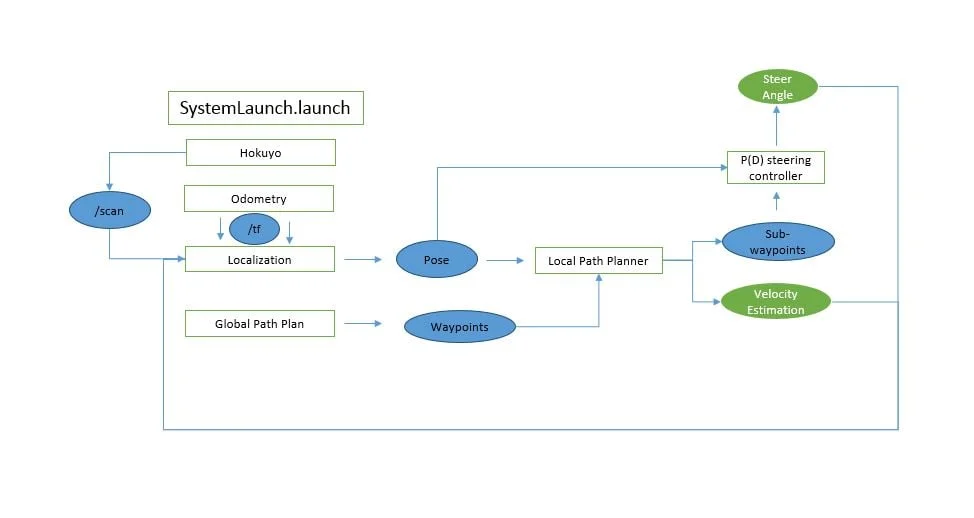
With the main modules defined, I designed our system's data flows and control logic.
Testing the Hack PGH autonomous car before the Race
The races were spread over two days and we tied for first place with the team from MIT. The Microsoft team withdrew from the competition a few days before the race because they hadn't been able to complete their car in time.
As part of my master’s degree, I research in the CMU Biomechatronics Laboratory. There, I lead the lab’s study of prosthetic knees.
The goal of this research is to create tools which will help researchers study the complex machine-human interaction that is the field of prosthetics, and help doctors prescribe the best possible prosthesis to each individual amputee.
The driving force behind our lab is to create the most flexible prosthetic devices on the planet. We want our devices to be able to mimic the kinematics and dynamics of any possible mechanical or eletro-mechanical prosthetic system.
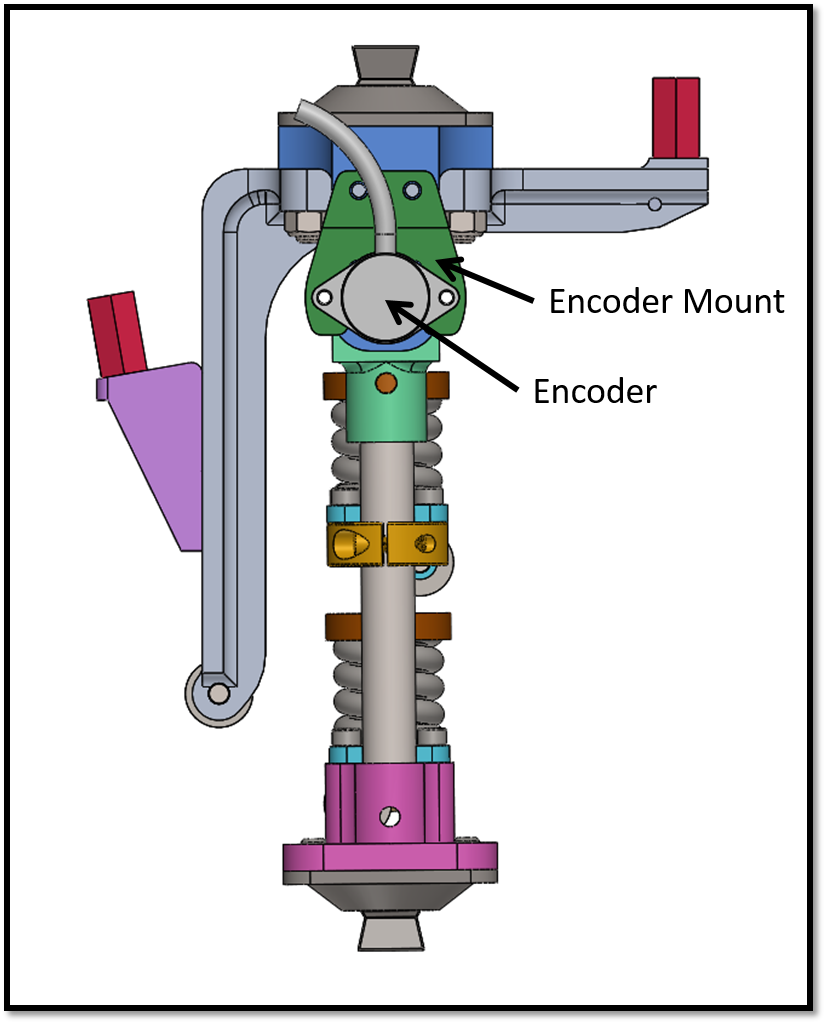
To achieve this, we have moved all motors and computing off of the knee. The knee is then powered by two large motors and cables. One motor runs over the front of the "kneecap" just like the human quadriceps. The other motor attaches to the back, like the human hamstring
By carefully sensing the state of the knee and precisely controlling the motors, we can make the knee act like it is driven by any mechanical or electro-mechanical system. Instead of building things like springs and dampers in hardware, we can move those decision to software. This takes away the need to constantly remove or change parts when you want to change the knee's behaviors.
The hope is for researchers to be able to take experimental concepts from idea to reality in a very short time, without having to build new hardware for every experiment. This has the potential to decrease their time-overhead and accelerate the pace of research in the field. Also, they can probe much more subtle aspects of the human-machine interface problem because they have very specific control over all of the device's parameters
I had the privilege of working with Uber to advance the state of the art in safety, mapping, and automation.
At DeWalt (AKA Stanley Black and Decker Professional Powertools Division) I was part of the Cordless Miter saw team, tasked with designing the DCS361. The project began just after I began working there and when I left, finished parts were beginning to roll off the assembly lines.
I was an integral part of the team through the initial design, designing and building the “Frankenstein” prototypes. Then, I helped gather user feedback and use it to refine our final design. By the end, I was responsible for the design and manufacturability of one of the four major subsystems of the saw. This included CAD models, safety testing, engineering drawings, and tolerance stack-ups.
This part I am most proud of from a design prospective. I worked closely with our Industrian Designer to bring a new, more aggressive vision to this, one of the most user-facing parts of the saw. This was all done while ensuring that it fulfilled its duty as the saw’s primary safety mechanism.
This accuracy and durability of this assembly is key to the use’s experience with the saw. It was a challenge from a manufacturing point of view as well as maintainability over time.
In a global economy, nothing is straightforward. To build a saw with world-class value we needed to be able to communicate effectively with groups all over the world.
4moms is looking to change the game when it comes to car seats.
During my time with them in the car seat new-product design group, I worked on improving one of the critical mechatronic safety systems.
The product I worked on has not yet been announced to the public, but can be described as the next generation of the car seat shown in the video here.
This is not CG. It is a next generation animatronic developed by Imagineering's R&D department and one of the robotic systems I was a part of.